Making Things Move with Clojure
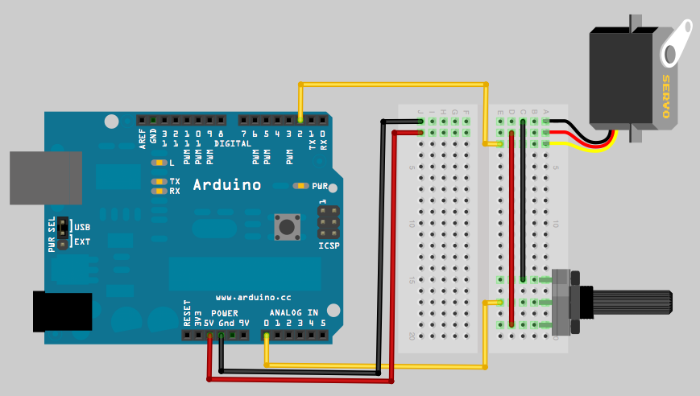
I have added analog write support to clodiuno, which can be used to send a PWM value or control a servo. Servos are the easiest way to play with motor control. Even though they don't turn 360 degrees, they can be used to create mechanisms such as levers and cams. Firmata library supports servos on pins 2 through 13, following code demonstrates how to control a servo using values read from an analog input in this case a potentiometer.
Code is made up of two functions, one of which I stole directly from the Arduino libraries,
(ns servo (:use :reload-all clodiuno.core) (:use :reload-all clodiuno.firmata)) ;;WMath.cpp (defn map-range [x in-min in-max out-min out-max] (+ (/ (* (- x in-min) (- out-max out-min)) (- in-max in-min)) out-min))
This is a Clojure version of the Arduino's map function, it will map the number in the in range into out range. Analog read returns a number between 0 and 1023 but the servo expects values between 0 and 179, this will turn the potentiometer reading into an angle for the servo.
;;analog 0 (def pot-pin 0) ;;digital 2 (def servo-pin 2) (defn servo [] (let [board (arduino :firmata "/dev/tty.usbserial-A6008nhh")] ;;allow board to boot (Thread/sleep 5000) ;;start reading potentiometer (enable-pin board :analog pot-pin) ;;attach servo (pin-mode board servo-pin SERVO) ;; (while true (let [pot (analog-read board pot-pin) angle (int (map-range pot 0 1023 0 179))] (analog-write board servo-pin angle))) ;; (close board)))
First we need to tell Firmata to start reporting readings for the potentiometer,
(enable-pin board :analog pot-pin)
Then we set servo pin to SERVO this will make Firmata to attach a servo on that pin,
(pin-mode board servo-pin SERVO)
Now we are ready to read input, map it into an angle, then write it to servo,
(while
true
(let [pot (analog-read board pot-pin)
angle (int (map-range pot 0 1023 0 179))]
(analog-write board servo-pin angle)))