Line Segment/Circle - Collision Detection
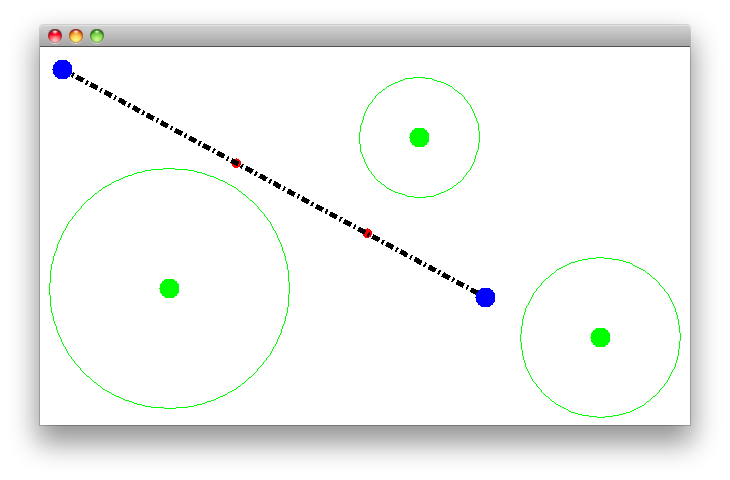
Here is another piece of code I didn't want to throw away, it uses vector projection to determine if a circle collides with a line segment. The idea was to figure out if one NPC can pass the ball to another in a way that no opposing team members can intercept it. We represent each opposing team player as a circle, the size of the circle will grow or shrink depending on the velocity of the player then we check each circle for collision with the line segment if non collides we assume it is a safe pass, following images shows a safe pass where non of the three opposing players can intercept the pass,
(defn closest-point-on-line [a b c] (let [ac (subtract c a) ab (subtract b a) proj-mag (dot-product ac (normalize ab))] (cond (< proj-mag 0) a (> proj-mag (magnitude ab)) b :default (add (project ac ab) a))))
We begin by creating two new vectors, one from the start of the line to end of the line (AB) and one from start of the line to the center of the circle (AC), then we calculate the magnitude (length) of the projection of AC onto AB, if it is smaller than 0 then the closest point on this line to the circle is the point A (start of the line segment), if it is bigger than the magnitude of the AB vector then the closest point is B, else we return the projection of AC onto AB plus A (which converts it back into world coordinates) that gives us the closest point on the line to the circle.
(defn path-clean [a b c r] (let [closest (closest-point-on-line a b c) distance (magnitude (subtract c closest))] (if (<= distance r) false true)))
Now that we know the location of the closest point on the line to the circle, collision detection is as simple as calculating the length between closest point and the circle, if it is smaller than the radius of the circle we have a collision else we have a clean path.