alter-ego - A Reactive AI Library
alter-ego is a reactive AI library based on the concept of behavior trees. Behavior trees combines a number of AI techniques such as Hierarchical State Machines, Scheduling, Planning, and Action Execution. Their strength comes from the fact that it is very easy to see logic, they are fast to execute and easy to maintain.
Behavior trees allow programmers to piece together reusable blocks of code which can be as simple as looking up a variable in game state to running an animation, then the behavior tree is used to control the flow and execution of these blocks of code.
As its name implies a behavior tree is a tree structure, made up of three types of nodes, action, decorator, composite. Composite and decorator nodes are used to control the flow within the three and action nodes are where we execute code they return success or failure and their return value is then used to decide where to navigate next in the tree.
In alter-ego actions are functions, Actions are used to change state such as calculating a new path or shooting at the player.
Selector and sequence nodes are workhorse internal nodes. Selector node will try to execute its first child, if it returns success it will also return success if it fails it will try executing its next child until one of its children returns success or it runs out of children at which point it will return failure. This property allows us to choose which behavior to run next,
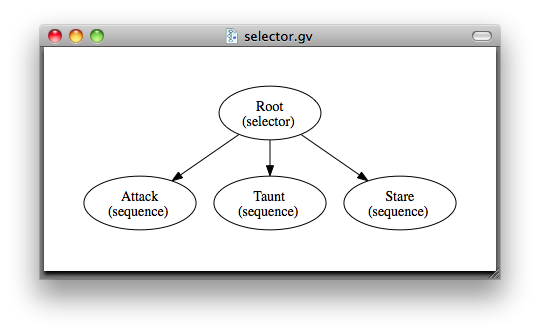
On the other hand a sequence represents a series of behaviors that we need to accomplish. A sequence will try to execute all its children from left to right, if all of its children succeeds sequence will also succeed, if one of its children fails sequence will stop and return failure.
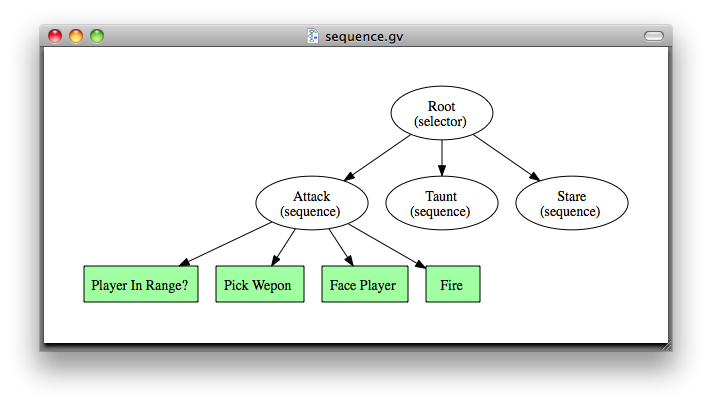
With the above tree, root selector first checks attack sequence, attack in return executes action Player In Range? if it succeeds we pick a weapon, face the player and fire. If Player In Range? fails we stop execution and it causes attack sequence to fail and selector tries to execute Taunt sequence.
Thats enough theory to put together something that works,
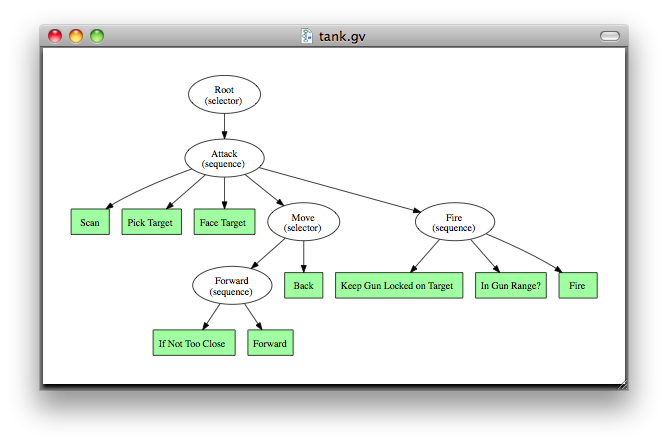
This represents a very simple AI logic for a robocode bot, every time we execute the tree, we scan for others bots in the arena, pick one to attack, then we execute Move selector, if we are not too close we move forward, if we are too close forward sequence will fail and we fall back to back action. We want our robot to be always ready to fire so the first thing we do in Fire sequence is to turn the turret towards the target then we check if we are within gun range, if we are we fire, if we are not we bail out which takes us back to scan, whether we fire or not we always keep the gun locked on the target.
Actions are Clojure functions, when working with Java methods you need to keep in mind that return value of the action will be coerced to boolean that is what determines success or failure of the action when methods return null even when they succeed such as fire above you need to return true explicitly. We define the tree,
(defn execute [robot] (.execute robot) true) ;;http://robowiki.net/wiki/Linear_Targeting (defn lock-gun [robot bb] (action (if-let [target (:target @bb)] (let [self-bearing (.getHeadingRadians robot) target-bearing (Math/toRadians (:bearing target)) gun-heading (.getGunHeadingRadians robot) abs-bearing (+ self-bearing target-bearing) sin (Math/sin (- target-bearing abs-bearing)) vel (/ (* (:velocity target) sin) 13) angle (Utils/normalRelativeAngle (+ (- abs-bearing gun-heading) vel))] (.setTurnGunRight robot (Math/toDegrees angle)) (execute robot))))) (defn tree [robot bb] (sequence "Attack" (action "Scan" (.setTurnRadarLeft robot 360) (execute robot)) (action "Pick Target" (dosync (alter bb assoc :target (first (sort-by :distance (vals (:enemies @bb))))))) (action "Face Target" (when (:target @bb) (.setTurnRight robot (:bearing (:target @bb))) (execute robot))) (selector "Move" (sequence (action "If Not Too Close" (if (nil? (:target @bb)) true (> (:distance (:target @bb)) safety))) (action "Forward" (.setAhead robot 100) (execute robot))) (action "Back" (.setBack robot 100) (execute robot))) (sequence "Fire" (lock-gun robot bb) (action "In Gun Range" (when (:target @bb) (< (:distance (:target @bb)) gun-range))) (action "Fire" (.fire robot 3) true))))
and execute it,
(defn -init [] [[] (ref {:enemies {}})]) (defn setup [robot] (.setColors robot Color/RED Color/WHITE Color/RED) (dosync (alter (.blackboard robot) assoc :robot robot))) (defn -onScannedRobot [robot event] (let [distance (.getDistance event) name (.getName event) bearing (.getBearing event) velocity (.getVelocity event) target {:distance distance :bearing bearing :velocity velocity}] (dosync (alter (.blackboard robot) assoc-in [:enemies name] target)))) (defn -run [robot] (setup robot) (let [tree (tree robot (.blackboard robot))] (exec (forever tree))))
Appendix in the raw file contains instructions on how to extract the source and interact with robocode.